
Our system is the first such product on the market. Its complexity will be appreciated on any watercraft equipped with navigation devices. Built-in advanced artificial intelligence algorithms will assist navigators in making decisions at sea.![]()
The competitive position of maritime transport compared to the other transport modes leads to a continuous increase in the carriage of goods by sea, which entails higher traffic intensity, vessel tonnages and speeds. This, in turn, adversely affects the safety of people, ships, cargo and marine environment. To enhance navigational safety, efficiency and competitiveness of transport services in maritime trade, both ships’ and land-based vessel traffic centres’ equipment and systems are constantly being upgraded. Such facilities perform mainly information functions and in this respect they support the process of safe ship conduct. However, the amount of information available on the ship has been on the rise while the technical systems have become more complex. For these reasons both information management and the resultant decision making are difficult, e.g. emergency situations may go beyond decision-maker’s abilities.
A review of maritime court decisions indicates that human errors are one of the major causes of marine accidents. Elimination or reduction of human errors, which would provide for possibly high safety level, can be achieved only by equipping ships with tools that, apart from information functions, will work out solutions to collision situations accompanied by adequate comments. None of the systems known to date is capable of performing such functions. Therefore, decision support is rather restricted, and, consequently, collisions sometimes are not avoided. A higher level of navigational safety gained through the introduction of the system performing the new functionalities will reduce the risk of marine accidents. This will bring the following advantages:
- social benefits due to lower rate of personnel injuries and loss of life on sea-going ships,
- material benefits due to lower loss of cargo, less damage to ships or sinkings,
- marine environment protection and prevention of ecological disasters that occur as a consequence of collision of ships carrying dangerous goods.
The navigational decision support system NAVDEC is the first navigational tool worldwide that performs information functions as well as those typical of decision support systems. Its innovative functionalities, significantly extending the performance of devices generally carried by ships, have now a status of patent applications filed at home and internationally.
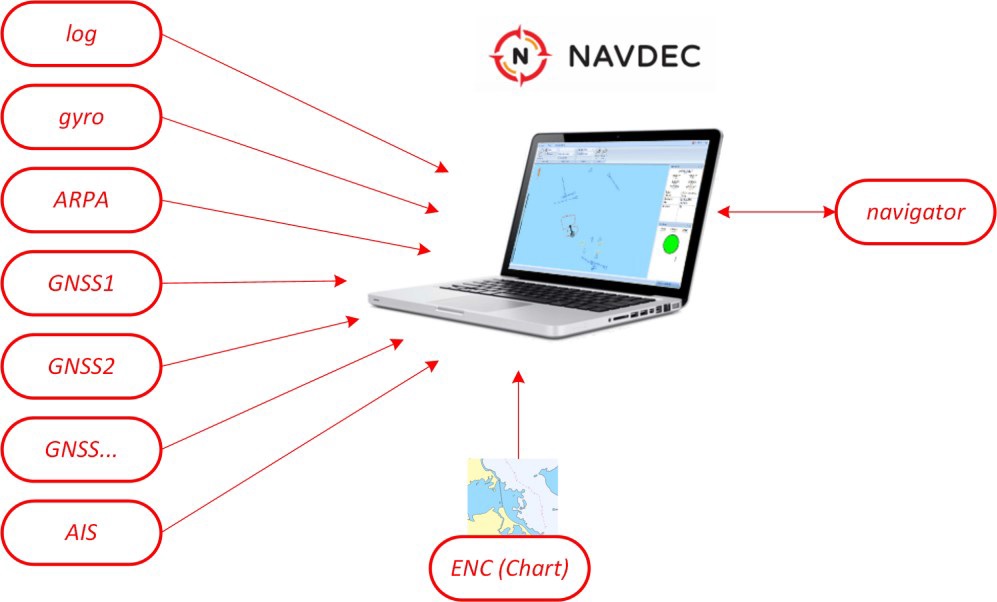
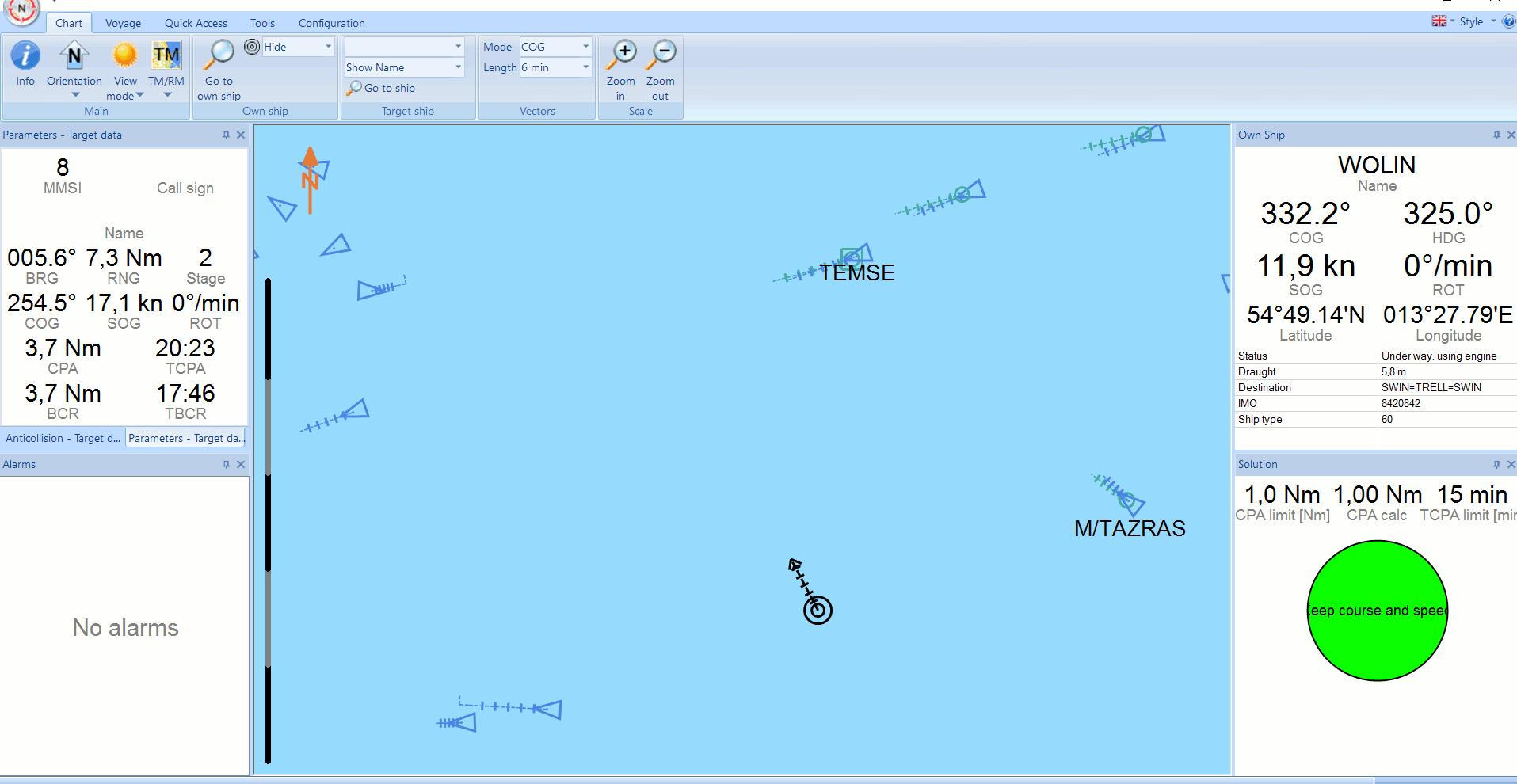
The NAVDEC complements the navigational equipment of the ship. It is a real time system handled by the navigator. The system observes its ship and the environment and records information on the present navigational situation. On this basis the system identifies and assesses the navigational situation (processing) and works out solutions (decisions) assuring safe navigation. For the system to function correctly it has to co-operate with standard equipment and systems installed on board (often used on leisure craft as well) such as: log, gyrocompas, ARPA (Automatic Radar Plotting Aids), GNSS (Global Navigational Satellite System), AIS (Automatic Identification System), ENC (Electronic Navigational Chart), sources of current navigational data. Similarly to the ECDIS system (Electronic Chart Display and Information System) the NAVDEC performs information functions – on one screen it presents bathymetric data from an electronic chart, an image of surface situation from a tracking radar, positional information from the AIS and GNSS receivers. Finally, it determines and presents to the navigator movement parameters of targets in vicinity.
Effective solutions to collision situations are based on the data defining own and other ships’ (targets) movement parameters. The accuracy of data presented to navigators is of major importance for their correct situation assessment and decisions to be made. Therefore, the NAVDEC system performs the fusion of own ship data (measurements from a number of shipboard GNSS receivers are used) and integration of data on targets from alternative sources (tracking radar, AIS).

Another novel function of the NAVDEC is an analysis and assessment of the navigational situation done in relation to all other or selected targets located within eight nautical miles (distance can be adjusted by the navigator). This is one of the decision making steps normally taken by the navigator, simply because the situation assessment takes into account relevant regulations. Thanks to the NAVDEC system the navigator is currently advised on the identification of an encounter situation in compliance with the Collision Regulations. This is a considerable aid, particularly in heavy traffic, although collisions of one-to-one ships in the open sea are known (m/v Gotland Carolina and m/v Conti Harmony in 2009). Where a situation is qualified as a collision situation, the navigator decides on a safe manoeuvre, the one that solves a given situation, determining what to do (alter course and/or speed) and the manoeuvre parameters: moment to begin it and values of course and/or speed alteration. The navigator may specify a safe course, on which the target will be passed at a preset range considered as safe. To date the NAVDEC is the only tool worldwide capable of performing this function. The NAVDEC ‘knows’ the Collision Regulations, principles of good sea practice, as well as criteria used by expert navigators. Apart from one specific solution the system submits, alternative solutions conforming with the regulations are also determined (possible range of course and/or speed alterations). Besides, the navigator is given a justification of the proposed manoeuvre. This function refers to all or selected targets.
Solutions proposed by the system, together with their justifications, do not relieve the navigator from responsibility, but make his/her decision much easier to make. However, it is possible to make the ship control automatic by direct connection of the NAVDEC with the autopilot, steering gear, main engine, engine telegraph and controllable pitch propeller. The NAVDEC is a product that will find applications on vessels and in land-based centres as an independent system or a module added to the existing navigational systems. Its main areas of use include:
- navigation-related decision support in collision situations – shipboard decision support system installed on the navigational bridge of:
- merchant vessels (sea-going and inland shipping),
- leisure boats (e.g. sailing ships, motor yachts),
- navigational decision support in collision situations – component of land-based vessel traffic services systems (VTS, VTMS, VTMIS, RIS);
- analysis and assessment of marine accidents at sea and on inland waterways – a system intended for experts working for maritime courts;
- marine officer training centres offering courses in the Collision Regulations – a module of navigational simulators (e.g. ship-handling, ECDIS).
The implementation of NAVDEC on ships will contribute to the reduction of marine environment pollution. Each ship’s collision is a potential environmental threat. According to the Baltic Marine Environment Protection Commission (HELCOM) in the years 2000 – 2009 there were 1006 accidents on the Baltic Sea alone. The majority of accidents occurred due to human errors, including incorrect situation assessment and wrong actions resulting from improper interpretation of radar data. 40 of those accidents caused environment pollution.
Comparison to competitive products
The major task of navigation is to conduct a ship efficiently and safely along an assumed trajectory. Bearing this in mind the navigator has to carry out two basic tasks: ship conduct along a preset trajectory and collision avoidance. Effective solutions to collision situations depend on ship movement data (own and others) and constraints resulting from the shape of the area. The accuracy of data presented to the navigator is of importance for the correct situation assessment and his/her decisions. Navigational systems presently used in the global fleet perform mainly information functions and correspondingly, to some extent provide an aid in safe vessel conduct. However, none of the known systems displays to the navigator ready solutions to a collision situation that are worked out in relation to all vessles in vicinity of their ship. This considerably limits decision support, consequently it limits the effectiveness of collision avoidance. Nowadays the navigational bridge of a ship features a number of devices that are supposed to assist the navigator to sail safely. The ARPA (Automatic Radar Plotting Aid), a commonly used tracking radar is a marine tool for decision support in collision situations. However, due to its numerous limitations, the ARPA is sometimes ineffective.
In comparison to the tracking radar, presently used on ships for calculating encounter parameters and working out an anti-collision manoeuvre, the NAVDEC has the following advantages:
- takes into account the Collision Regulations, for both good and restricted visibility,
- works out a manoeuvre also for the ship located in the radar blind sector,
- the operator is immediately notified about a manoeuvre started by another ship thanks to information on target’s rate of turn,
needs just a few seconds to calculate the encounter parameters. On the other hand, the tracking radar, according to test situations defined by the IMO (International Maritime Organization), after one minute of tracking presents the CPA (Closest Point of Approach) with a one nautical mile accuracy. After three minutes, the maximum allowable error of CPA and TCPA (Time to Closest Point of Approach) calculated by the radar may amount to, respectively, 0.3 Nm and 0.5 minute. These tolerances are given with a 95% probability,
- more accurately calculates the encounter parameters, by:
- taking account of the ship’s size thanks to information on the position of the antenna, received from the AIS (Automatic Identification System),
- use of GPS (Global Positioning System) / DGPS (Differential GPS) for position determination,
- takes account of the ships’ sizes while planning an anti-collision manoeuvre,
- calculates new courses and speeds of own ship, such that other vessels will be passed at a preset CPA.
Another information system commonly used on sea-going ships is the ECDIS (Electronic Chart Display and Information System) often referred to as an electronic chart. Apart from displaying the positions and movement vectors of own ship and targets (vessels in vicinity), it also allows to, inter alia, obtain information on depths, aids to navigation and coastline. However, it is only an information system. The NAVDEC system moves a step forward. Besides providing the navigator with the same scope of information, necessary for safe navigation, as the ECDIS, the NAVDEC recommends ready solutions enabling the ship to safely pass vessels or stationary objects. Moreover, these solutions take into account ship’s manoeuvring ability and the present area restrictions, i.e. existing traffic separation schemes, shoreline and safe depths. The NAVDEC is, therefore, a very useful decision support system.
The innovation that the NAVDEC introduces is that, apart from typical functions of information systems such as ECDIS or ARPA, this system features the following functions:
- fusion and integration of navigational data received from shipboard devices,
- analysis and assessment of a navigational situation taking into consideration the Collision Regulations in force,
- automatic determination of solutions to collision situations by using dedicated computational algorithms, including optimization algorithms,
- explanation of the present navigational situation making use of a navigational knowledge base (collision regulations, principles of good sea practice, criteria of navigational situation analysis and assessment actually used by expert navigators),
- justification of the recommended manoeuvre.
The NAVDEC is the first system in the world to offer support in navigation-related decision making on the ship to such a wide extent. It goes in line with the concept of e-navigation that is being developed on the IMO forum. In 2006 a Correspondence Group on E-navigation was established at the IMO. E-navigation is defined as ‘the harmonized collection, integration, exchange, presentation and analysis of marine information onboard and ashore by electronic means to enhance berth to berth navigation and related services for safety and security at sea and protection of the marine environment’.